Rotation Equations¶
To rotate a point, (x,y) about the origin beta degrees to
a new location, (x_new,y_new), the point is moved as shown in
the following diagram.
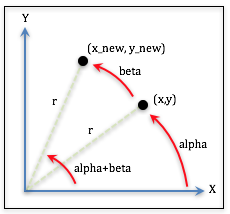
Rotate (x,y) beta degrees to (x_new,y_new)
From basic trigonometry, we know the following facts:
x = cos(alpha) * r Eq1
y = sin(alpha) * r Eq2
x_new = cos(alpha+beta) * r Eq3
y_new = sin(alpha+beta) * r Eq4
Using the “angle addition” formulas from trigonometry,
sin(alpha+beta) = sin(alpha)*cos(beta) + sin(beta)*cos(alpha)
cos(alpha+beta) = cos(alpha)*cos(beta) - sin(beta)*sin(alpha)
we can re-write equations 3 and 4 like this:
x_new = cos(alpha+beta) * r = [cos(alpha)*cos(beta) - sin(beta)*sin(alpha)] * r
y_new = sin(alpha+beta) * r = [sin(alpha)*cos(beta) + sin(beta)*cos(alpha)] * r
Multiplying r times each term and re-arranging gives us this:
x_new = cos(alpha)*r *cos(beta) - sin(beta) * sin(alpha)*r
y_new = sin(alpha)*r *cos(beta) + sin(beta) * cos(alpha)*r
Now, substituting equations 1 and 2 into these equations gives:
x_new = x * cos(beta) - sin(beta) * y
y_new = y * cos(beta) + sin(beta) * x
Writing this in matrix format gives:
y_new
=cos(beta)
sin(beta)
-sin(beta)
cos(beta)
*x
y
Eq5
This is a rotation about the Z axis. The z component of a 3D vertex is not effected by this rotation, so we can write the rotation in terms of a 3D transformation matrix like this:
y_new
z
1
=cos(beta)
sin(beta)
0
0
-sin(beta)
cos(beta)
0
0
0
0
1
0
0
0
0
1
*x
y
z
1
Eq6
Using similar logic, rotations about the X and Y axes can be easily formulated.