7.5 - Rotating a Camera (e.g., tilt)¶
This lesson discusses how to rotate a camera’s orientation. Remember that almost all camera motion is relative to the camera’s current frame of reference.
Tilt Motion¶
To tilt a camera means you rotate a camera’s orientation around its u axis. You can tilt up (positive rotation) or tilt down (negative rotation).
As in the previous lesson, there are two basic ways to implement a tilt camera motion:
- Modify the parameters of a call to the
lookatfunction and then calllookatto create a camera transformation matrix, or - Directly modify the definition of a camera’s position and coordinate axes.
Let’s solve the problem both ways.
Use lookAt to Tilt¶
In the previous lesson you studied a class called LookAtCamera which
defines a camera using two points and one vector: 1) the location of the camera,
2) the location of a point along it’s line-of-sight, and 3) a direction that is
upwards. To “tilt” a camera, we add a new function to the LookAtCamera
class called tilt.
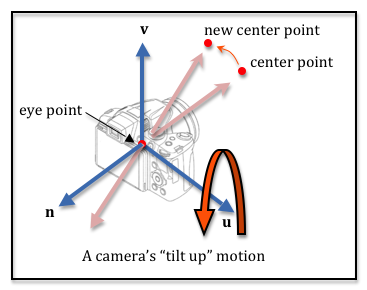
A tilt movement must change the center point.
We need to rotate the location of the center point about the camera’s
u axis, which will change the line-of-sight of the camera. Remember that
the camera will be invalid if the line-of-sight and the up-vector are pointing
in the same direction. Therefore, if the angle between the line-of-sight vector and
the up-vector gets small, we need to rotate the up-vector to keep it
away from the line-of-sight vector. The diagram illustrates a tilt movement.
The tilt function receives an angle, in degrees, which is the amount of rotation. If the angle is positive, the function will “tilt up”. If the angle is negative, the function will “tilt down”. The basic steps are:
- Calculate the camera’s
uaxis. - Move the camera to the origin. This moves the eye point to the origin and it
moves the center point to some location relative to the origin. You
translate by
(-eye_x, -eye_y, -eye_z). This is required because all rotation is about the origin. - Rotate the center point about the u axis by the angle of tilt.
- Move the camera back to its original location. You translate the
center point by
(eye_x, eye_y, eye_z). - Use the
lookAtfunction to recalculate the camera’s transformation matrix.
Note that all of the above operations need to be performed by 4-by-4 transformation matrices because you are not necessarily working in a plane that is parallel to the global axes.
Use the following demo to experiment with tilting a camera. Notice that tilting is always relative to the camera’s frame of reference. The code is editable if you want to experiment.
Perform a camera
The left canvas shows the relative location of the scene objects and the camera.
The right canvas shows the scene from the camera's vantage point.
Manipulate the lookAt function's parameters:
lookAt(M, eye_x, eye_y, eye_z, center_x, center_y, center_z, up_dx, up_dy, up_dz)
| eye (0.0, 0.0, 5.0) | center (0.0, 0.0, 0.0) | up <0.0, 1.0, 0.0> |
| X: -5.0 +5.0 | X: -5.0 +5.0 | X: -1.0 +1.0 |
| Y: -5.0 +5.0 | Y: -5.0 +5.0 | Y: -1.0 +1.0 |
| Z: -5.0 +5.0 | Z: -5.0 +5.0 | Z: -1.0 +1.0 |
You must study the above code carefully to understand camera movement. Please don’t skip the comment statements as you study the code.
Modify A Camera’s Definition¶
Let’s implement the “tilt” motion of a camera using the camera’s basic definition:
a location and three coordinate axes. Using the AxesCamera class
we introduced in the previous lesson, we can use the rotateAboutU function
to implement a tilt motion because that is precisely what a tilt is.
To tilt a camera we simply need to rotate the v and n coordinate
axes about the u axis. The eye location of the camera does not
change.
Please study the rotateAboutU function in the following demo program.
This demo code is editable.
Perform a camera tilt motion.
The left canvas shows the relative location of the scene objects and the camera.
The right canvas shows the scene from the camera's vantage point.
Manipulate the camera's definition:
| eye (0.0, 0.0, 5.0) | u <1.00, 0.00, 0.00> v <0.00, 1.00, 0.00> n <0.00, 0.00, 1.00> |
| X: -5.0 +5.0 | u angle: -180.0 +180.0 |
| Y: -5.0 +5.0 | v angle: -180.0 +180.0 |
| Z: -5.0 +5.0 | n angle: -180.0 +180.0 |
Summary¶
A camera movement that involves rotation will rotate about one
of the current axes of the camera’s coordinate system.
If a camera tilts, the rotation is about the u axis. If
a camera pans, the rotation is about the v axis. If a
camera cants, the rotation is about the n axis.
Camera motion is almost always relative to a camera’s current frame of reference.
As in the previous lesson, manipulating the actual camera definition (a point and 3 axes) requires less computation but more mathematical understanding of the camera matrix transform.
Glossary¶
- tilt camera
- Rotate a camera upwards or downwards, keeping its location unchanged.
- pan camera
- Rotate a camera left or right, keeping its location unchanged.
- cant camera
- Rotate a camera about its line-of-sight, keeping its location unchanged.
Self Assessment¶
-
Q-167: To perform a tilt camera movement, which parameters of the
- center point
- Correct. Changing the center point moves the camera's line-of-sight but leaves the position of the camera unchanged.
- eye and up vector
- Incorrect. The up-vector does not control the camera's exact orientation.
- center point and up vector
- Incorrect. The up-vector does not control the camera's exact orientation, but the center point does.
- up vector only
- Incorrect. The up-vector does not control the camera's exact orientation.
lookAt
function must be changed?
-
Q-168: To perform a tilt camera movement, which camera axis must you rotate about?
- u axis
- Correct. You are rotating "up" or "down" from the camera's current orientation.
- v axis
- Incorrect. Rotating about the v axis would be a pan motion.
- n axis
- Incorrect. Rotating along the n axis would be a cant motion.
-
Q-169: A tilt camera movement is a rotation. Why can’t we use simple trig functions
like sine and cosine to calculate the required modifications to the camera definition?
Why do we have to use matrix transforms?
- sine and cosine are only defined in a plane, but a tilt is relative to a camera's current orientation.
- Correct. The tilt rotation is about an arbitrary axis, not the x, y or z axis.
- well, actually you could use normal trig calculations.
- Incorrect. Actually, you can't!
- sine and cosine only work in the x-y plane.
- Incorrect. Sine and cosine only work in a plane, but are not restricted to the x-y plane.
- matrix transforms minimize the calculations required.
- Incorrect. Matrix multiplies are computationally expensive.